
第1页 / 共4页
第2页 / 共4页
试读已结束,还剩2页,您可下载完整版后进行离线阅读
THE END
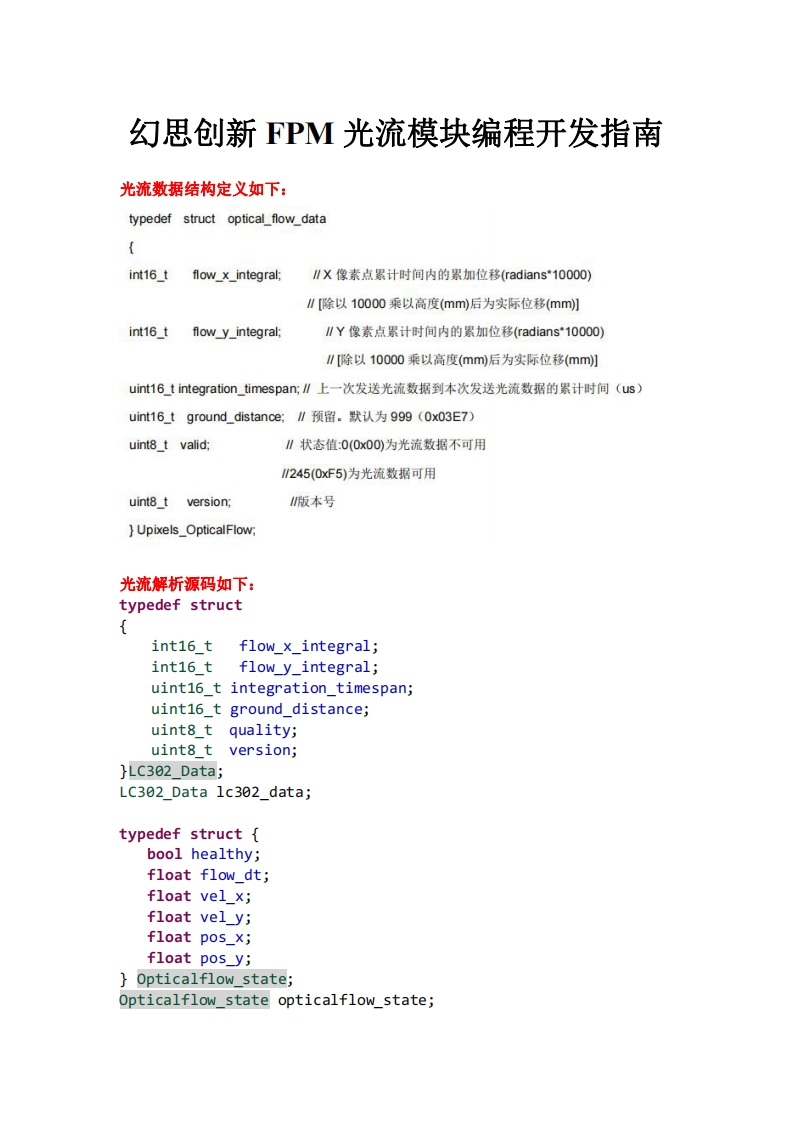
幻思创新FPM光流模块编程开发指南光流数据结构定义如下:typedef struct optical_flow_dataint16_tflow_x_integral;∥X像素点累计时间内的累加位移(radians10000)∥[除以10000乘以高度(mm)后为实际位移(mm]int16_tflow_y integral;∥Y像素点累计时间内的累加位移(radians10000)∥除以10000乘以高度(mm)后为实际位移(mm]uint16 t integration timespan;∥上一次发送光流数据到本次发送光流数据的累计时间(us)uint16 t ground distance;∥预留。默认为999(0x03E7)uint8_t valid;∥状态值:0(0x00)为光流数据不可用1245(0xF5)为光流数据可用uint8_tversion;版本号}Upixels_OpticalFlow;光流解析源码如下:typedef structint16_t flow_x_integral;int16 tflow_y_integral;uint16 t integration timespan;uint16_t ground_distance;uint8 t quality;uint8 t version;}LC302 Data;LC302 Data 1c302_data;typedef structbool healthy;float flow_dt;float vel_x;float vel_y;float pos_x;float pos_y;Opticalflow_state;Opticalflow state opticalflow_state;

请登录后查看评论内容